Block sliding on a frictional table¶
Reference: Florian A. Potra, Mihai Anitescu, Bogdan Gavrea, Jeff Trinkle. A linearly implicit trapezoidal method for
integrating stiff multibody dynamics with contact, joints, and friction. International Journal for Numerical Methods in
Engineering, vol. 66, pp. 1079-1124, 2006.
|
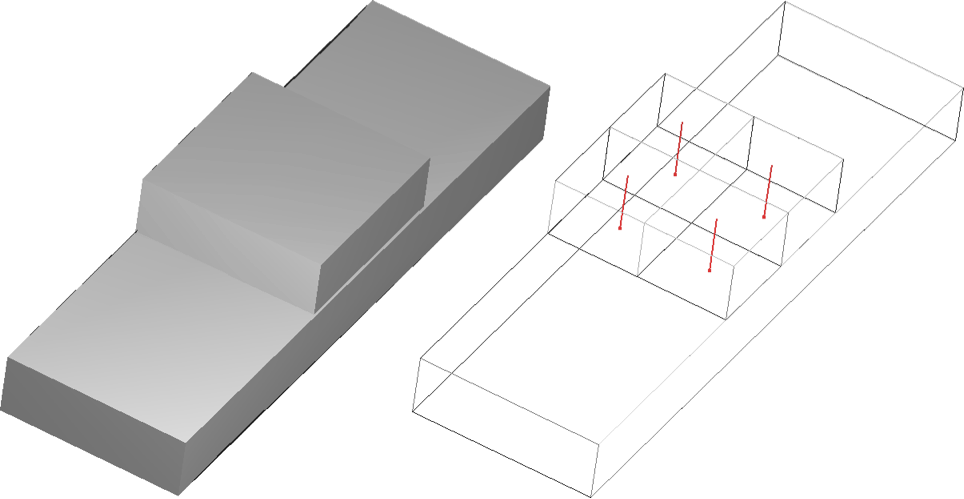
Fig. 22 Block sliding on top of a frictional surface – initial configuration with four contact points.¶
The block has been discretised into four hexahedral elements, thus four contact points result from the element to element contact model implemented in Solfec-1.0. An equivalent three–dimensional model is used in Solfec-1.0 as the reference 1 uses a two–dimensional set–up. The external force acting on the mass centre of the cube reads
Input parameters¶
Block density \(\left(kg/m^{3}\right)\) |
\(\rho=111.1(1)\) |
Block dimensions \(\left(m\right)\) |
\(a\times b\times h=0.3\times0.3\times0.1\) |
Initial velocities \(\left(m/s\right)\) |
all zero |
Gravity acceleration \(\left(m/s^{2}\right)\) |
\(\mathbf{g}=\left[0,0,-9.81\right]\) |
Velocity restitution |
\(\epsilon=0\) |
Coulomb friction coefficient |
\(\mu=0.8\) |
Results¶
Simulation over the time interval \(\left[0,10\right]\) was performed with the time step \(h=0.001\). As the reference 1 does not specify numerical values of the results, a visual comparison of the \(v_{x}\) velocity component and the \(x\)-coordinate histories of the mass centre is provided in Fig. 23 and Fig. 24.
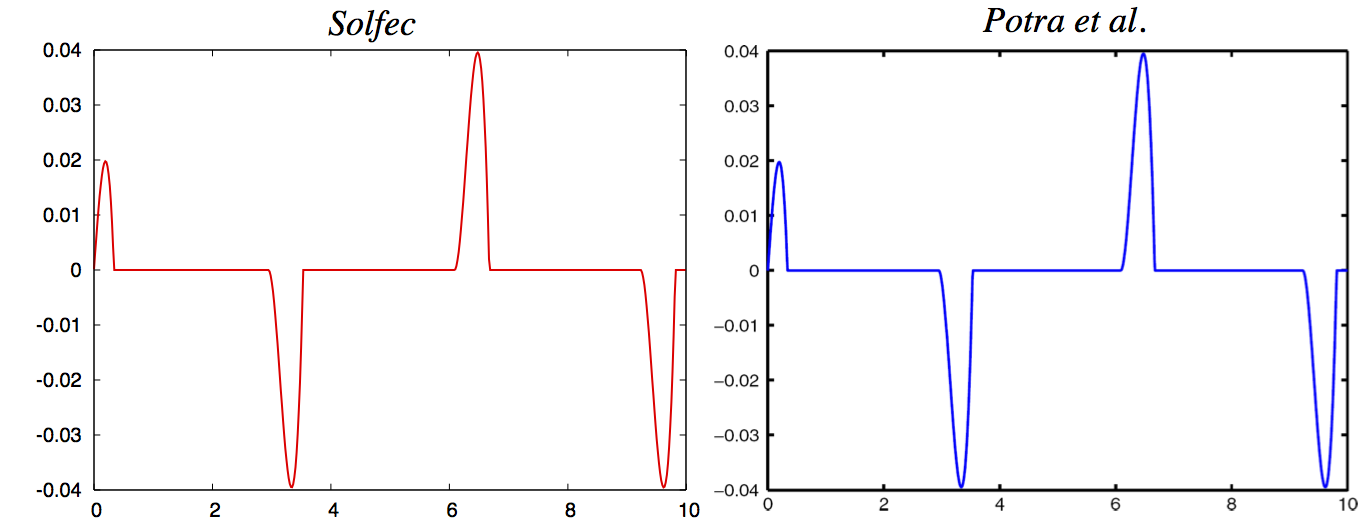
Fig. 23 Comparison the \(v_{x}\) velocity component plots of the block mass centre.¶
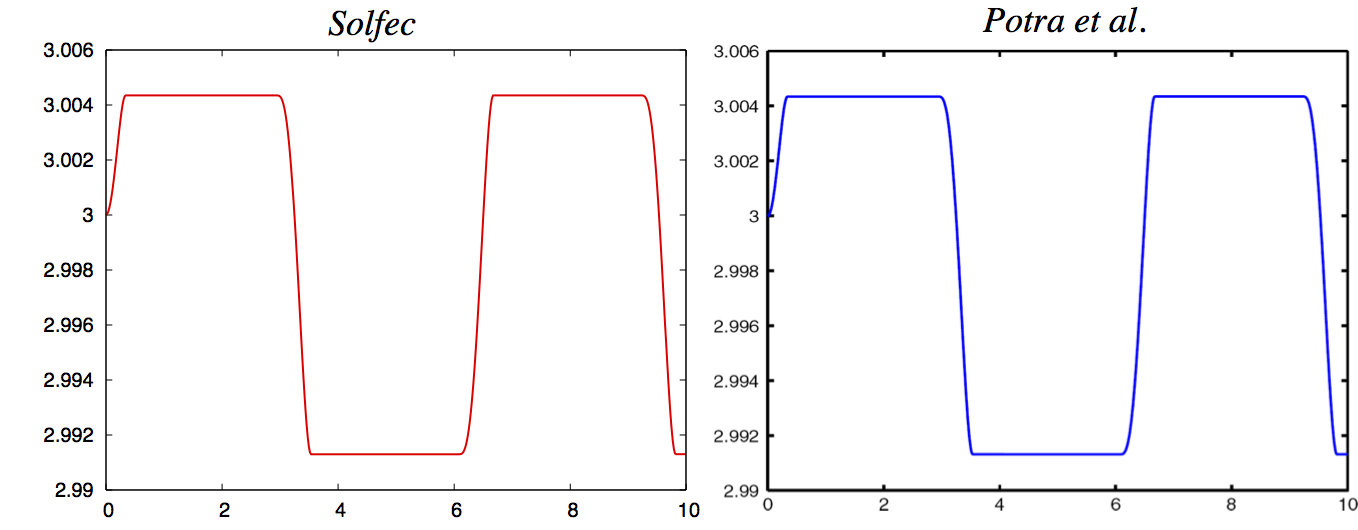
Fig. 24 Comparison of the \(x\)-coordinate plots of the block mass centre.¶
Fig. 25 Animation of the sliding block motion (reload page or click on image to restart).¶