Pinned bar¶
Reference: W. G. McLean, E. W. Nelson, C. L. Best, Schaum’s Outline of Theory and Problems Reference: of Engineering
Mechanics, Statics and Dynamics, McGraw-Hill Book Co., Inc., New York, NY, 1978, p. 336.
|
The length of the spatial angular velocity vector at \(\theta=0\deg\) reads
provided the bar was released at \(\theta=30\deg\).
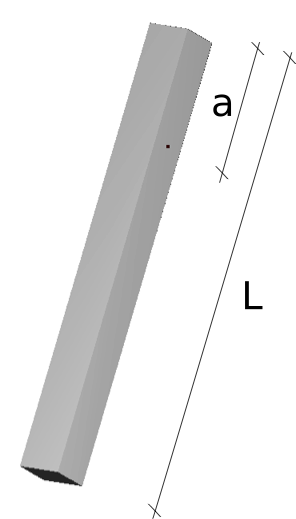
Fig. 15 The pinned bar in the initial configuration.¶
Input parameters¶
Density \(\left(kg/m^{3}\right)\) |
\(\rho=1\) |
Square cross-section \(\left(m^{2}\right)\) |
\(b\times b=0.1\times0.1\) |
Length \(\left(m\right)\) |
\(L=1\) |
Distance to joints \(\left(m\right)\) |
\(a=0.25\) |
Gravity acceleration \(\left(m/s^{2}\right)\) |
\(\mathbf{g}=\left[0,0,-9.8\right]\) |
Results¶
The time step used in the analysis is \(h=2^{-8}\). The hinge is modeled by a pair of spherical joints. The computations are terminated for the first n such that \(\theta\left(nh\right)\le0\) (interpolation of the results to the exact point \(\theta\left(t\right)=0\) is omitted). The table below summarizes the results
Target |
Solfec-1.0 |
Ratio |
|
Length of angular velocity when \(\theta=0\deg\,\, \left(rad/s\right)\) |
2.121 |
2.116 |
0.997 |
Fig. 16 Animation of the pinned bar (reload page or click on image to restart).¶