Double pendulum impacting a rigid wall¶
Reference: Florian A. Potra, Mihai Anitescu, Bogdan Gavrea, Jeff Trinkle. A linearly implicit trapezoidal method for
integrating stiff multibody dynamics with contact, joints, and friction. International Journal for Numerical Methods in
Engineering, vol. 66, pp. 1079-1124, 2006.
|
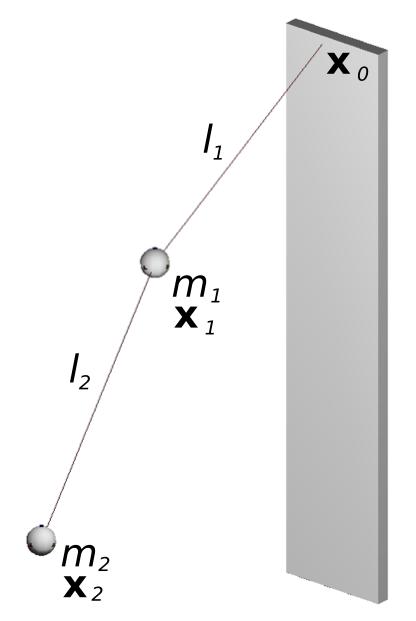
Fig. 18 Double pendulum in the initial configuration.¶
The reference 1 uses the Poisson impact model, while Solfec-1.0 uses the Newton model. Both models are equivalent in case of frictionless impact if all restitution coefficients are identical 2. This is the case in the example, thus the comparison is feasible. As Solfec-1.0 does not handle contacts between objects with zero volume, mass points were approximated by spheres and the distance between the wall and the rest configuration of the pendulum was shifted by the sphere radius.
Input parameters¶
Mass \(\left(kg\right)\) |
\(m_{1}=m_{2}=1\) |
Length \(\left(m\right)\) |
\(l_{1}=l_{2}=1\) |
Point \(\mathbf{x}_{0} \left(m\right)\) |
\(\mathbf{x}_{0}=\left[0,0,2\right]\) |
Point \(\mathbf{x}_{1} \left(m\right)\) |
\(\mathbf{x}_{1}=\left[\sin\left(\frac{\pi}{3}\right), 0,2-\cos\left(\frac{\pi}{3}\right)\right]\) |
Point \(\mathbf{x}_{2} \left(m\right)\) |
\(\mathbf{x}_{2}=\left[\sin\left(\frac{\pi}{3}\right)+\sin\left(\frac{\pi}{5}\right), 0,2-\cos\left(\frac{\pi}{3}\right)-\cos\left(\frac{\pi}{5}\right)\right]\) |
Initial velocities \(\left(m/s\right)\) |
all zero |
Gravity acceleration \(\left(m/s^{2}\right)\) |
\(\mathbf{g}=\left[0,0,-9.81\right]\) |
Velocity restitution |
\(\epsilon=0.1\) |
Coulomb friction coefficient |
\(\mu=0\) |
Results¶
Simulation over the time interval \(\left[0,2.5\right]\) was performed with the time step \(h=0.001\). As the reference 1 does not specify numerical values of the results, a visual comparison of the total energy and the \(x\)-coordinate histories of the mass points is provided in Fig. 19 and Fig. 20.
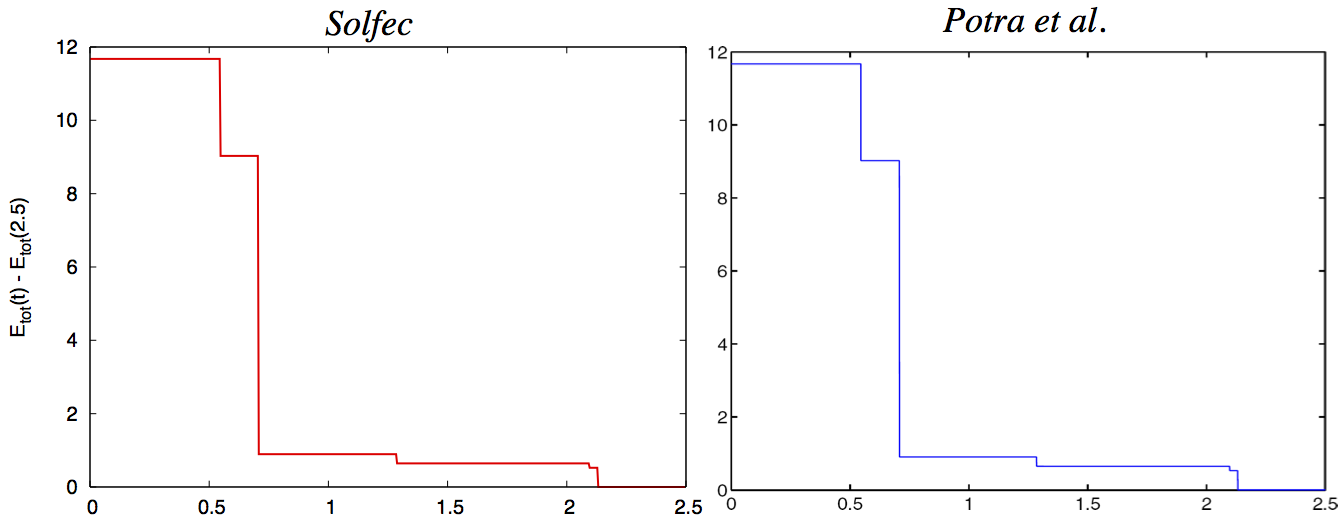
Fig. 19 Comparison the total energy plots versus time.¶
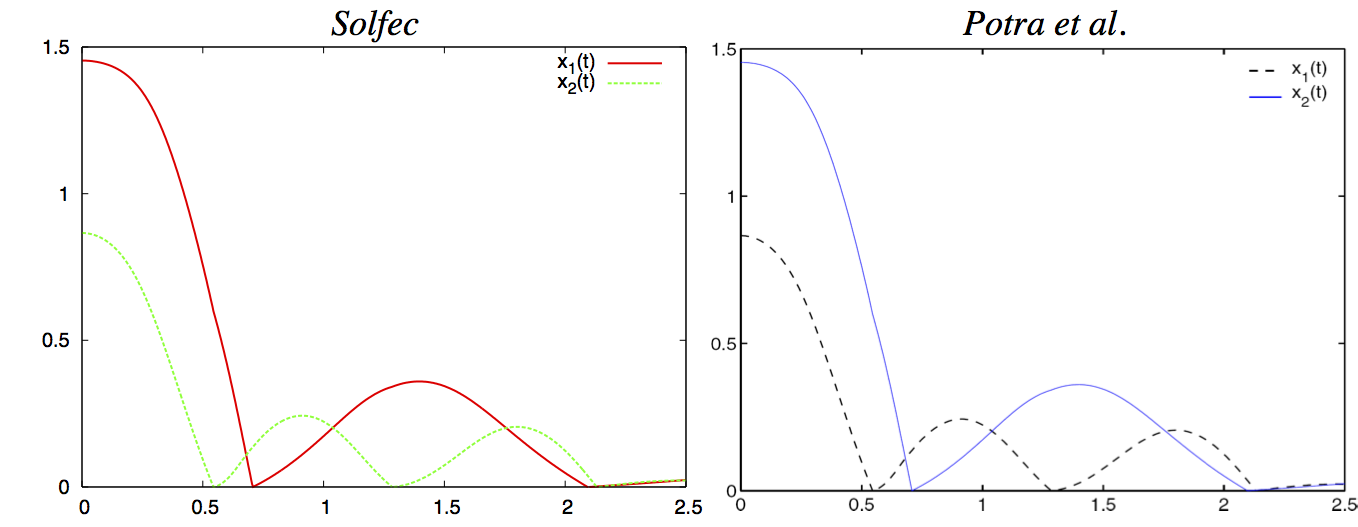
Fig. 20 Comparison of the \(x\)-coordinate plots (\(x_{i}\left(t\right)\) stands for the \(i\)-th mass point \(x\)-coordinate).¶
Fig. 21 Animation of the double pendulum motion (reload page or click on image to restart).¶