Pendulum¶
Reference: W. Rubinowicz, W. Królikowski, Mechanika teoretyczna (Theoretical mechanics), Państwowe Wydawnictwo Naukowe,
Warszawa, 1998, pp. 91-99.
|
The period of an oscillatory mathematical pendulum reads
where
and \(l\) is the length of the pendulum, \(g_{3}\) is the vertical component of the gravity acceleration and \(\theta_{max}\) is the maximal tilt angle of the pendulum. Let us assume the initial velocity of the pendulum to be zero. Thus \(\theta_{max}=\theta\left(0\right)\). Taking the rest configuration position of the mass point \(\bar{\mathbf{x}}=\left[0,0,0\right]\) and considering the swing in the \(x-z\) plane, the initial position of the pendulum reads
Without the initial kinetic energy \((E_{k}\left(0\right)=0)\), the energy conservation requires that
where
and \(m\) is the scalar mass.
Input parameters¶
Length \(\left(m\right)\) |
\(l=1\) |
Mass \(\left(kg\right)\) |
\(m=1\) |
Initial angle \(\theta\left(0\right)=\theta_{max}\,\, \left(rad\right)\) |
\(\theta_{max}=\pi/2\) |
Gravity acceleration \(\left(m/s^{2}\right)\) |
\(\mathbf{g}=\left[0,0,-\pi^{2}\right]\) |
The gravity acceleration \(g_{3}\) has been chosen so that for \(\theta_{max}=0\deg\) there holds \(T=2s\).
Results¶
The table below summarizes the results for the time step \(h=0.001\). The solution is accurate and stable after 1 and 10 swings. Fig. 17 illustrates the energy balance over one period of the pendulum. The potential and kinetic energies sum up to \(\pi^{2}\).
Target |
Solfec-1.0 |
Ratio |
|
Pendulum period – 1 swing \(\left(s\right)\) |
2.360 |
2.360 |
1.000 |
Total energy – 1 swing \(\left(J\right)\) |
\(\pi^{2}\) |
9.86960 |
1.000 |
Pendulum period – 10 swings \(\left(s\right)\) |
23.60 |
23.60 |
1.000 |
Total energy – 10 swings \(\left(J\right)\) |
\(\pi^{2}\) |
9.86960 |
1.000 |
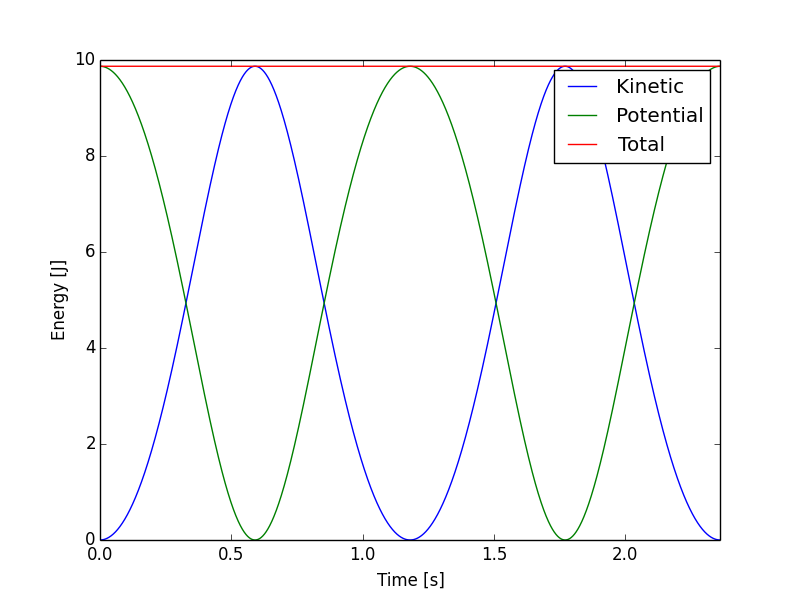
Fig. 17 Energy balance over one period of the pendulum.¶