Heavy symmetrical top¶
Reference: J. C. Simo, K.K. Wong, Unconditionally stable algorithms for rigid body dynamics that exactly preserve
energy and momentum, International Journal for Numerical Methods in Engineering, vol. 31, pp. 19–52, 1991.
|
The top of mass \(M\) and the referential axis of symmetry \(\mathbf{E}_{3}\) rotates in the uniform gravitational field \(-g\mathbf{e}_{3}\). The spatial torque reads
where the assumed values are \(M=20\), \(g=1\), \(l=1\). As pointed out in 1, the heavy top model conserves the Hamiltonian
where \(\pi=\mathbf{j}\mathbf{w}\) is the spatial angular momentum, \(\mathbf{j}=\mathbf{\Lambda}\mathbf{J}\Lambda^{T}\) is the spatial tensor of inertia, \(\mathbf{J}\) is the referential inertia tensor, \(\Lambda\) is the rotation operator, and \(\mathbf{w}=\Lambda\mathbf{W}\) is the spatial angular velocity.
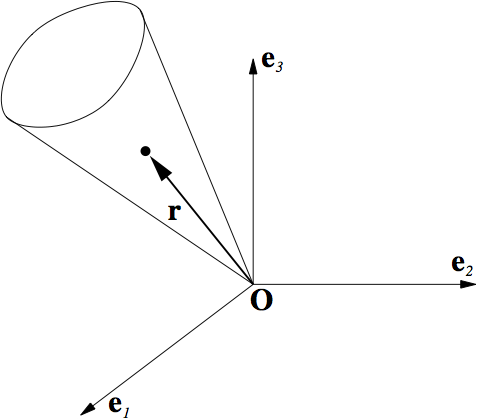
Fig. 10 Heavy symmetrical top with one point fixed.¶
Input parameters¶
Referential inertia tensor |
\(\mathbf{J}=\mbox{diag}\left[5,5,1\right]\) |
Spatial torque |
\(\mathbf{t}=-20\Lambda\left(:,3\right)\times\left[0,0,1\right]\) |
Initial rotation |
\(\Lambda\left(0\right)=\exp\left[\mbox{skew}\left(\left[0.05,0,0\right]\right)\right]\) |
Initial angular velocity |
\(\mathbf{W}\left(0\right)=\left[0,0,50\right]\) |
Results¶
Taking the fact that
and
the value of the Hamiltonian reads
Fig. 11, Fig. 12 and Fig. 13 show the Hamiltonian plots over the time interval \(\left[0,10\right]\) for time steps \(h\in\left\{ 0.001,0.003,0.009\right\}\). It is seen that for the largest step the decay of the Hamiltonian is smaller than \(0.1\%\), while it should be noted that the corresponding amount of the rotation per time step is about \(26\deg\). This amount of the relative rotation per time step is generally too large for the contact analysis. It is seen that for smaller steps the conservation of the Hamiltonian rapidly improves and becomes nearly exact for \(h=0.001\), where the amount of the relative rotation is about \(3\deg\) per step.
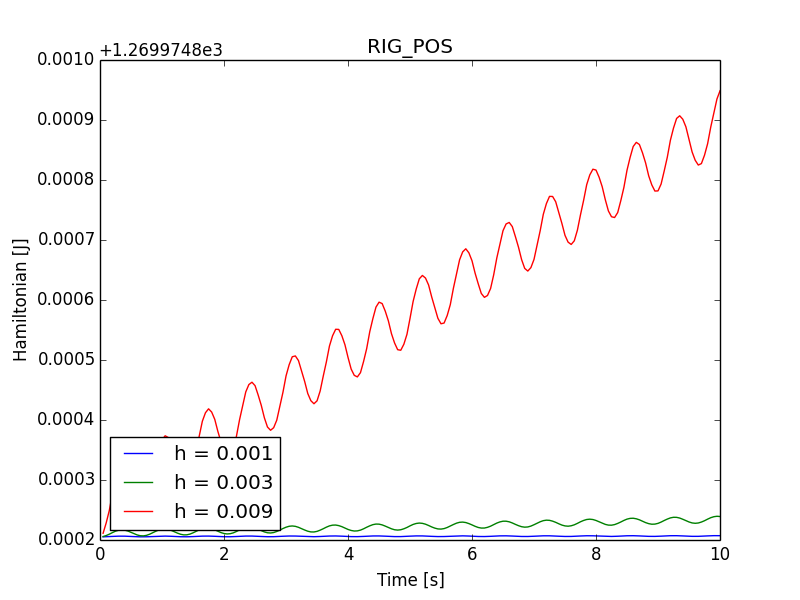
Fig. 11 Hamiltonian plots for several time steps and the RIG_POS integration scheme.¶
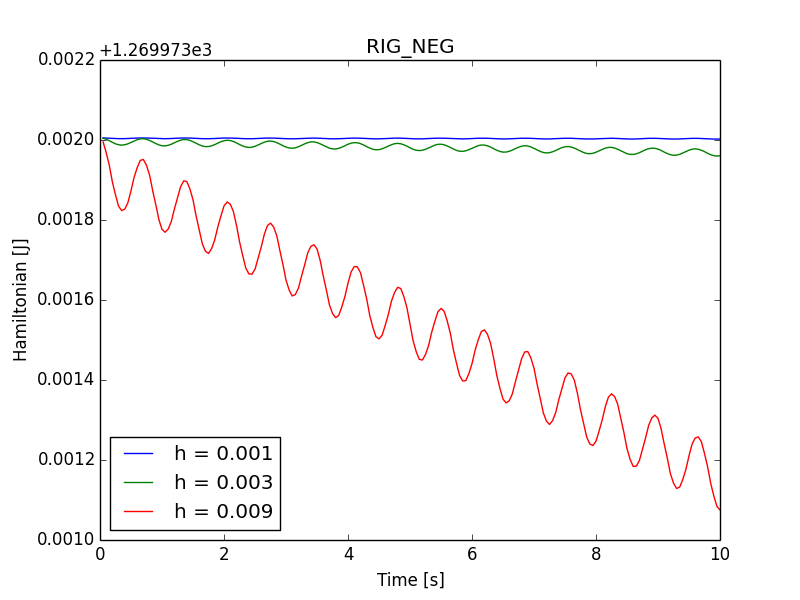
Fig. 12 Hamiltonian plots for several time steps and the RIG_NEG integration scheme.¶
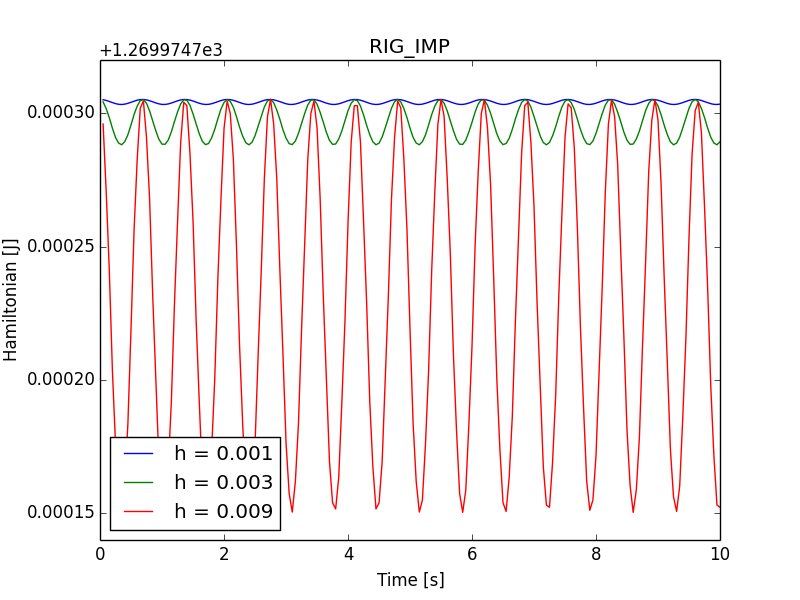
Fig. 13 Hamiltonian plots for several time steps and the RIG_IMP integration scheme.¶